Jaunųjų mokslininkų darbai eISSN 1648-8776
2021, vol. 51 (1), pp. 111–119 DOI: https://doi.org/10.15388/JMD.2021.11
VDA 4500 tipo konteinerių paletavimo roboto manipuliatoriaus griebtuvo stiprumo analizė
Analysis of Strength of VDA 4500 Type Container Palletizing Robot Manipulator Gripper
Klaidas Urbonas
UAB Plieno fortas
E. p. klaidasurb@gmail.com
Sergėjus Rimovskis
Vilniaus universiteto Šiaulių akademija
E. p. sergejus.rimovskis@sa.vu.lt
Artūras Sabaliauskas
Šiaulių valstybinė kolegija
E. p. a.sabaliauskas@svako.lt
Santrauka. Straipsnyje pristatoma suprojektuota moderni VDA 4500 tipo konteinerių paletavimo sistema: pagal paletuojamą taros tipą ir jos masę parinktas robotas, suprojektuotas roboto manipuliatoriaus griebtuvo prototipas, apskaičiuota griebtuvo svirčių apkrova, parinkti svirčių valdymo pneumatiniai cilindrai, atlikta svirties stiprumo analizė bei nustatyta griebtuvo masė.
Reikšminiai žodžiai: robotas, VDA 4500, paletavimas, griebtuvas.
Summary. An analysis of the company’s existing palletizing process has been performed, and the most appropriate method of process modernization has been selected accordingly. Also, a robot was selected according to the type of container to be palletized and its weight. A prototype of a robot manipulator gripper has been designed. The load calculation of the gripper levers was performed, the pneumatic cylinders for the lever control were selected. Lever strength analysis was also performed. The gripper mass was determined.
Keywords: robot, VDA 4500, palletizing, gripper.
Received: 2021-02-23. Accepted: 2021-04-12
Copyright © 2021 Klaidas Urbonas, Sergėjus Rimovskis, Artūras Sabaliauskas. Published by Vilnius University Press. This is an Open Access article distributed under the terms of the Creative Commons Attribution Licence, which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are credited.
Įvadas
Paletavimo operacijos objektas – maisto produktų pakuočių transportavimo konteineris. Tirtas paletavimo procesas vykdomas X įmonėje, kurioje įdiegta konvejerinė gamyba. Beveik visos šioje įmonėje esančios gamybos linijos yra automatizuotos, tad be žmonių įsikišimo gamybos ceche pagaminta produkcija yra dedama į Europos Sąjungos standartizuotus plastmasinius konteinerius, kurių matmenys ‒ 600×400×300 mm (1 pav.). Šie konteineriai atitinka VDA 4500 standartą, kurį iš pradžių apibrėžė Vokietijos automobilių pramonės asociacija (VDA), o vėliau jis buvo pritaikytas daugelyje kitų gamybos ir laivybos pramonės sričių. Gamybos ceche į konteinerius sudėta produkcija konvejerine linija keliauja į kitą cechą, kuriame atliekamas paletavimas.

1 pav. VDA 4500 tipo (600×400×300 mm) konteineris
Šaltinis: https://klt-vda.com/coll/klt/rl-klt
Paletavimas yra vienas iš nedaugelio X įmonėje neautomatizuotų procesų, kai pagaminta ir į konteinerius sudėta produkcija kraunama ant palečių tolesniam apdirbimui arba išvežimui užsakovams. Šiame rankiniu būdu atliekamame procese dažnai kyla tokių problemų:
• darbo monotoniškumas;
• darbo sunkumas (dėl ko darbuotojai daugiau serga);
• didelė darbuotojų kaita;
• sunku rasti šiam darbui tinkamų darbuotojų;
• pasitaiko klaidų.
Darbo tikslas ‒ suprojektuoti modernią VDA 4500 tipo konteinerių paletavimo sistemą.
Esamo paletavimo proceso analizė
Visos robotizuotos paletavimo sistemos kaina gali svyruoti nuo 25 iki 400 tūkst. eurų. Tokiam dideliam sistemų kainų skirtumui įtakos turi roboto keliamoji galia ir greitis, per kurį robotas atlieka vieną ciklą. Gamintojas robotų kainai įtakos neturi, tačiau renkantis paletavimo robotą, vis dėlto reikėtų atkreipti dėmesį į žinomus gamintojus, tokius kaip FANUC, Kuka, ABB ar kt., jau seniai dirbančius robotų srityje ir galinčius pasiūlyti daugiau naujų ir darbą palengvinančių technologijų, pvz., vizualizacijos programų.
Vienas pagrindinių paletavimo roboto parinkimo veiksnių yra keliamoji galia. Žinant, kad reikės pakelti produktų dėžes, kurių bendras svoris apie 25 kilogramai ir kad prie roboto bus tvirtinamas griebtuvas, kurio svoris pagal pasirinktas medžiagas ir tam tikras modifikacijas gali siekti 30‒40 kg, bendras griebtuvo ir roboto svoris turėtų būti apie 65 kg. Pagal gamintojų rekomendacijas, paletavimo robotą vertėtų pasirinkti bent 1,5‒2 kartus didesnės keliamosios galios nei keliamas krovinys. Procesui įmonėje automatizuoti pasirinktas FANUC gamintojo paletavimo robotas M-410iB/140H (2 pav.). Toks industrinis 5 ašių robotas manipuliatorius kainuoja apie 120 tūkst. eurų [7].
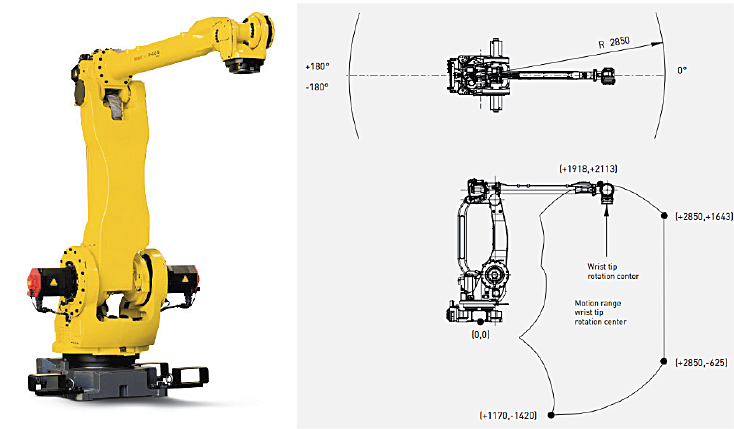
2 pav. Paletavimo robotas FANUC M-410iB/140H
Šaltinis: https://www.fanuc.eu/dk/en/robots/robot-filter-page/m-410-series/m-410ib-140h
Manipuliatoriaus griebtuvo projektavimas
Svarbus aspektas šioje automatizuojamoje paletavimo linijoje – prie manipuliatoriaus tvirtinamas griebtuvas. Tai nėra standartinis mechanizmas, kurį kaip robotą būtų galima išsirinkti iš tiekėjų gaminamos produkcijos. Griebtuvo paskirtis – paimti ir palaikyti manipuliatoriaus darbo aplinkoje pernešamą objektą. Šiam darbui atlikti galima naudoti skirtingų tipų griebtuvus, priklausomai nuo to, kokioje darbo zonoje dirbama ir koks objektas yra keliamas. Kadangi tiriamoje modernizacijoje yra keliamos tik vieno tipo ir vieno dydžio plastmasinės dėžės, tad ir griebtuvas bus pakankamai paprastos konstrukcijos, pritaikytas tik šiai operacijai. Pagrindinis keliamas objektas yra konteineris (VDA4500), kuris pavaizduotas 1 paveiksle. Visi šio tipo konteineriai turi specifines kėlimo angas, kurias reikia įvertinti pasirenkant griebtuvo koncepciją ir projektuojant griebtuvo prototipą. Atsižvelgus į aprašytus griebtuvų tipus [4, 5, 7], galima teigti, kad tinkamiausias ir mažiausiai išlaidų reikalaujantis yra pneumatiniais cilindrais valdomas griebtuvas. Pagal konteinerio matmenis ir pagrindinius techninius paletavimo proceso duomenis sukurto griebtuvo prototipo vaizdas pateiktas 3 paveiksle. Tokio griebtuvo projektavimo ir pagaminimo kaina galėtų siekti apie 8 tūkst. eurų. Šis griebtuvas turi surenkamą korpusą ir šešis suspaustu oru valdomus pneumatinius cilindrus. Keturi cilindrai per svirteles atlieka konteinerio užfiksavimo, kėlimo ir perstatymo funkcijas. Kiti du cilindrai valdo prispaudžiamąją plokštę, kuri prilaiko konteinerį iš viršaus ir apsaugo jį nuo svyravimo į šonus. Visas griebtuvo korpusas bus gaminamas iš 18 milimetrų storio aliuminio 6061 plokštės. Ši medžiaga pasirinkta dėl mažo svorio ir lengvo technologinio apdirbimo.
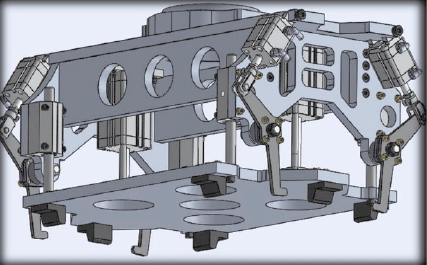
3 pav. Paletavimo roboto griebtuvo prototipas (sudaryta autorių)
Griebtuvo svirčių spaudimo jėgos skaičiavimas
Projektuojant griebtuvą, labai svarbu apskaičiuoti, kokia svirčių suspaudimo jėga yra reikalinga numatytų parametrų dėžei pakelti ir manipuliuoti. Skaičiuojant svarbu atsižvelgti į daugelį veiksnių, tokių kaip manipuliatoriaus pasiekiamumas ir greitis, judesio metu atsirandančios inercijos jėgos ir aplinkos veiksniai. Keliamos detalės parametrai:
• Griebiamo krovinio masė: 25 kg.
• Griebiamos detalės ilgis: 600 mm.
• Griebiamos detalės plotis: 400 mm.
• Griebiamos detalės aukštis: 300 mm.
Paletavimo griebtuvas judės horizontalia ir vertikalia kryptimis, kils aukštyn ir žemyn, be to, atliks ir sukamuosius judesius. Didžiausios jėgos veikia manipuliuojamą detalę, kai griebtuvas juda vertikalia kryptimi ir yra veikiamas gravitacijos ir inercijos jėgų. 4 paveiksle pavaizduotas detalės laikymo griebtuvu eskizas iš priekio.
Suspaudimo jėga F yra lygi [2]:
 , (1)
, (1)
čia 𝑚0 – keliamos detalės masė, kg; 𝑘s – atsargos koeficientas. Laikoma, kad 𝑘s = 2,4 [2].
Iš FANUC paletavimo robotų katalogo [3] buvo pasirinktas manipuliatorius M-410iB/140H. Kadangi griebtuvas tvirtinamas ant manipuliatoriaus galo (5 jungties), skaičiavimai atliekami pasinaudojant 5 ašies greičiu.
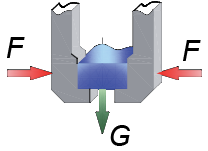
4 pav. Objekto laikymo griebtuvu eskizas iš priekio (sudaryta straipsnio autorių)
Norint atlikti skaičiavimus, duotas manipuliatoriaus J5 grandies greitis (rad/s) [2]:
 . (2)
. (2)
Grandies vidutinis pagreitis apskaičiuojamas pagal formules [2]:
 , (3)
, (3)
 , (4)
, (4)
čia 𝑡is – pavaros įsibėgėjimo laikas (elektrinėms pavaroms 𝑡𝑖s = (0,3–0,5 s) [23]. Laikoma, kad 𝑡𝑖s = 0,4 s, tada grandies maksimalus pagreitis apskaičiuojamas pagal formules [2]:
 , (5)
, (5)
 , (6)
, (6)
čia 𝑘𝑎 – elektrinei pavarai 1,5 [2].
Griebtuvo suspaudimo jėga:
 . (7)
. (7)
Skaičiavimai parodė, kad 25 kilogramų svorio konteinerio perkėlimo metu griebtuvo dviejų svirčių suspaudimo jėga turi būti 539 N. Taigi vienos svirties suspaudimo jėga turi būti 269,5 N. Išsiaiškinus reikalingą vienos svirties suspaudimo jėgą, reikia apskaičiuoti, ar pneumatiniai cilindrai parinkti teisingai ir ar užteks dėžės suspaudimo jėgos.
Svirčių valdymui buvo pasirinkti AIRTEC firmos NXD32 dvigubos eigos pneumatiniai cilindrai (5 pav.). Gamintojo pateikiamos pneumatinio cilindro charakteristikos [1] leidžia daryti išvadą, kad cilindro generuojama stūmimo jėga pakankama, tačiau ši jėga perduodama per svirteles. Reikia sudaryti veikiančių jėgų eskizą (6 pav.) ir apskaičiuoti, ar šios 434 N jėgos tikrai užteks.

5 pav. AIRTEC NXD pneumatinis cilindras
Šaltinis: https://www.airtec.de/piston-rod-cylinders.html
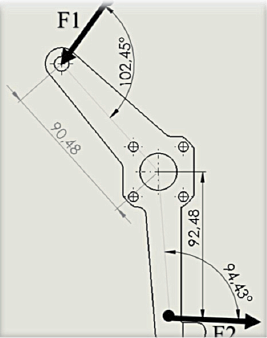
6 pav. Svirtelę veikiančių jėgų eskizas (sudaryta straipsnio autorių)
Svirties jėga apskaičiuota pagal lygybę, kuri atspindi atvirkštinį santykį tarp jėgų ir pečių santykių [2]:
 . (8)
. (8)
Apskaičiavus gauta, kad per svirtį veikianti jėga bus lygi 413 N. Tokios jėgos visiškai užtenka, tad pneumatinis cilindras parinktas tinkamai.
Griebtuvo svirties stiprumo analizė
Atsižvelgus į griebtuvo konstrukcijos ypatumus ir darbo režimus, galima teigti, kad papildomo stiprumo įvertinimo reikalauja vienintelis mechanizmo elementas – svirtis. Gaminyje tokių elementų yra 4 vnt. Svirties stiprumo modeliavimas buvo atliktas, naudojant kompiuterinę baigtinių elementų analizės sistemą Solidworks Simulation. Elemento geometrija pritaikyta pagal sudarytą detalės modelį, elemento medžiaga – plienas S235 (takumo riba – 235 MPa; stiprumo riba – 360 MPa). Buvo atlikti du tyrimai.
Pirmuoju tyrimu vertintas statinio svirties apkrovimas maksimalia pneumatinio cilindro užspaudimo jėga ir veikiant konteinerio su kroviniu (25 kg) svoriui. Šio tyrimo metu gautų von Mises įtempių vaizdas pateiktas 7a , o poslinkių – 7b paveiksle. Gauti maksimalūs įtempiai siekia 42,9 MPa. Akivaizdu, kad šis apkrovimas nėra pavojingas. Poslinkiai taip pat nėra dideli (maksimalus plokštelės įlinkis siekia 0,03 mm) ir nedaro neigiamos įtakos mechanizmo manipuliavimo tikslumui.
Antrojo tyrimo metu, be minėtų statinių apkrovų, buvo įvertintos ir dinaminės apkrovos, t. y. inercijos jėgos, kurios atsiranda griebtuvo su kroviniu judesio metu. Svirties stiprumui pavojingiausias šoninis greitėjantis ar lėtėjantis griebtuvo judesys.
a 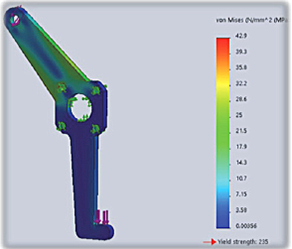 b
b 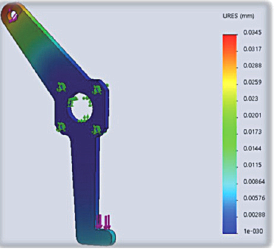
7 pav. Svirties modeliavimo rezultatai: a – įtempiai, b – poslinkiai (sudaryta straipsnio autorių)
Judesio metu svirtis veikia jėga, kurios dydis priklauso nuo judesio pagreičio:
 , (9)
, (9)
čia m – krovinio masė, kg; amax – maksimalus griebtuvo pagreitis (m/s2) šoninio judesio metu.
Žinome, kad bendra konteinerio su kroviniu masė siekia apie 25 kilogramus, o maksimalus pagreitis judesio pradžios ar stabdymo metu neviršija 6,9 m/s2. Tad pasinaudojus (9) formule apskaičiuota papildoma apkrova dėl inercijos jėgų su atsargos koeficientu 1,3 (dėl galimų perkrovų) siekia apie 230 N. Vienai svirčiai tenkanti šoninė jėga ‒ 58 N. Ši jėga pridėta statmenai svirčiai apatinėje elemento dalyje (8 pav., a). 8 paveiksle taip pat pateiktas ir von Mises įtempių pasiskirstymas. Analizė parodė, kad detalėje atsirandančių didžiausių įtempių reikšmė lygi 98,5 MPa. Nors gauti įtempiai yra dukart didesni nei pirmojo tyrimo atveju, tačiau jie žymiai mažesni nei tamprumo riba. Gautas atsargos koeficientas – 2,4. Poslinkių pasiskirstymo vaizdas pateiktas 8b paveiksle. Gautas maksimalus plokštelės įlinkis – 0,3 mm.
Tyrimo rezultatai rodo, kad griebtuvo stiprumas eksploatavimo metu bus pakankamas. Kadangi gautas didelis atsargos koeficientas, papildoma elementų nuovargio analizė dėl ciklinių apkrovų nėra būtina.
a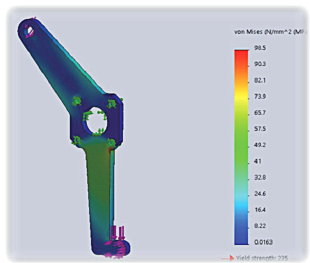 b
b 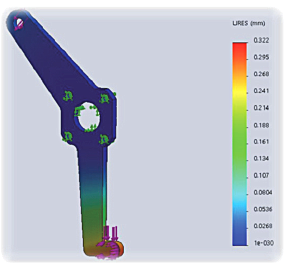
8 pav. Svirties su pridėtine jėga modeliavimo rezultatai: a – įtempiai, b – poslinkiai (sudaryta straipsnio autorių)
Griebtuvo svorio nustatymas
Įvertinus griebtuvą veikiančias jėgas, patikrinus pneumatinių cilindrų parinkimo pagrįstumą ir atlikus griebtuvo svirčių stiprumo analizę, apskaičiuojama bendra griebtuvo masė. Griebtuvo mechaninės dalies detalizavimas pateiktas 9 paveiksle. Kadangi čia neįvertinta pneumatinės įrangos masė, papildomai bendrą griebtuvo masę reikės padidinti apie 3,5 kg.
Bendra griebtuvo masė yra pakankamai svarbi prieš pasirenkant robotą. Suprojektuoto griebtuvo masei nustatyti naudota Solidworks programinė įranga. Šia programa atliktas visų elementų projektavimas, jiems priskirtos medžiagos ir automatiškai apskaičiuotos detalių masės. Kadangi griebtuvo korpusas yra didelių matmenų ir jo neveikia jokios didelės jėgos, nuspręsta naudoti aliuminį 6061, kuris yra pakankamai lengvas ir gerai technologiškai apdirbamas. Be to, ši medžiaga yra pakankamai tvirta ir pasižymi geromis antikorozinėmis savybėmis. Griebtuvo svirtims ir ašims parinktas konstrukcinis plienas S235.
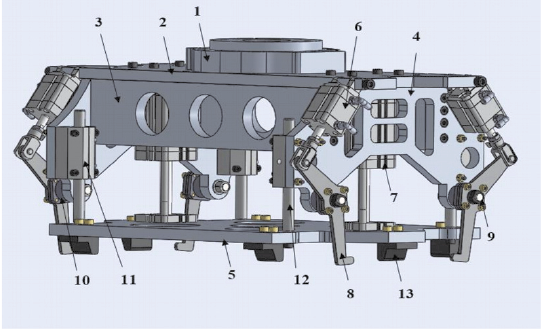
9 pav. Griebtuvo komponentų numeracija: 1 – tvirtinimas prie manipuliatoriaus; 2 – pagrindinė plokštė; 3 – šoninė plokštė; 4 – svirčių ir šliaužiklių tvirtinimo plokštė; 5 – prispaudžiamoji plokštė; 6 – pneumatinis cilindras NXD-32; 7 ‒ pneumatinis cilindras NXD-A-50; 8 – svirtis; 9 – svirties ašis; 10 – svirties laikymo elementas; 11 ‒ rutulinės įvorės elementas; 12 ‒ grūdintas plieninis velenėlis; 13 – atrama (sudaryta straipsnio autorių)
Įvertinus visas griebtuvo komponentų mases, bendra suprojektuoto griebtuvo masė su numatyta atsarga (tai leis užtikrinti patikimą paletavimo procesą per visą sistemos eksploatavimo laikotarpį) m = 37,8 kg.
Išvados
1. Atlikta griebtuvo svirties statinė ir dinaminė (įvertinant inercijos jėgas) stiprumo analizė parodė, kad veikiant dinaminei apkrovai svirtyje susidaro dvigubai didesni įtempiai (98,5MPa) nei esant statinei apkrovai (42,9MPa), tačiau jie daug mažesni nei medžiagos tamprumo riba (235MPa). Gautas atsargos koeficientas 2,4.
2. Ir dinaminė, ir statinė griebtuvo svirties analizė parodė, kad maksimalus svirties įlinkis yra 0,3 mm. Toks įlinkis nedarys neigiamos įtakos mechanizmo manipuliavimo tikslumui.
3. Viso griebtuvo apskaičiuota masė yra 37,8 kg. Suprojektuoto griebtuvo masė gauta su 5,5 % atsarga, kas leis užtikrinti patikimą paletavimo procesą per visą sistemos eksploatavimo laikotarpį.
Literatūra
1. AIRTEC Pneumatic GmbH, [interaktyvus] [žiūrėta 2021-01-19]. Prieiga per internetą: https://www.airtec.de/piston-rod-cylinders.html.
2. Bakšys B., Fedaravičius A., 2004, Robotų technika. Kaunas: Technologija.
3. Fanuc. The factory automation company, [interaktyvus] [žiūrėta 2021-01-19]. Prieiga per internetą: https://www.fanuc.eu/dk/en/robots.
4. Lukauskas P., 2015, Manipuliatoriaus griebtuvo kūrimas ir tyrimas. Magistro baigiamasis projektas. Kauno technologijos universitetas.
5. Onrobot, [interaktyvus] [žiūrėta 2021-02-03]. Prieiga per internetą: https://onrobot.com/en/products
6. Robot System Cost Series, [interaktyvus] [žiūrėta 2021-02-19]. Prieiga per internetą: https://motioncontrolsrobotics.com/range-robot-cost/.
7. RobotWorks, [interaktyvus] [žiūrėta 2021-01-21]. Prieiga per internetą: https://www.robots.com/articles/grippers-for-robots.